 |
Fun with PWM
0.32
|
|
Fun with PWM
0.32
|
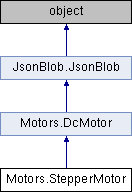
Stepper Motor abstraction. More...
Public Member Functions | |
| def | __init__ (self, index=None) |
| def | resetData (self) |
| def | reload (self) |
| def | getOutputOrder (self, asList=False) |
| def | setZeroAngle (self) |
| def | moveToAngle (self, newAngle=0) |
| def | moveByAngle (self, newAngle=0) |
| def | updateDriveState (self) |
| def | stop (self) |
| def | save (self) |
| def | joystickCallback (self, dev_num, signal, number, name, value, init) |
| def | keyboardCallback (self, hex, ascii) |
 Public Member Functions inherited from Motors.DcMotor Public Member Functions inherited from Motors.DcMotor | |
| def | __init__ (self, index=None) |
| def | resetData (self) |
| def | reload (self) |
| def | addCallback (self, name, func) |
| def | removeCallback (self, name) |
| def | hasCallback (self, name) |
| def | doCallbacks (self) |
| def | start (self) |
| def | stop (self) |
| def | save (self) |
| def | setDriveState (self, driveState=0) |
| def | updateDriveState (self) |
| def | simulateKeyUp (self) |
| def | updateShadowState (self) |
| def | initControllers (self) |
| def | hasControllers (self) |
| def | newController (self, controllerType='joystick') |
| def | updateController (self, controller, controllerType='joystick') |
| def | hasController (self, controllerType, ident) |
| def | removeController (self, controllerType, ident) |
| def | joystickCallback (self, dev_num, signal, number, name, value, init) |
| def | keyboardCallback (self, hex, ascii) |
| Public Member Functions inherited from JsonBlob.JsonBlob | |
| def | __init__ (self, index=None, autoload=True) |
| def | reload (self) |
| def | save (self) |
| def | delete (self) |
| def | blobExists (self) |
| def | getModulePath (self) |
| def | getTypePath (self) |
| def | getRowPath (self) |
| def | getRowFileName (self) |
Public Attributes | |
| stage | |
| angle | |
| target | |
| outputOrders | |
| sequences | |
| enabled | |
| normalizeAngle | |
| minTime | |
| outputOrder | |
| sequence | |
| sequenceLength | |
| pins | |
| acceleration | |
| controllers | |
| shadowState | |
| Public Attributes inherited from Motors.DcMotor | |
| jsonData | |
| now | |
| shadowState | |
| driveTypes | |
| pwm | |
| scheduler | |
| kbthread | |
| last | |
| running | |
| controllersEnabled | |
| driveType | |
| pins | |
| enabled | |
| acceleration | |
| controllers | |
| driveState | |
| joystickRegistry | |
| Public Attributes inherited from JsonBlob.JsonBlob | |
| jbModule | |
| jbType | |
| jbIndex | |
| jsonData | |
Additional Inherited Members | |
| Static Public Member Functions inherited from Motors.DcMotor | |
| def | CleanupGpio () |
| Static Public Member Functions inherited from JsonBlob.JsonBlob | |
| def | reindex (force=False) |
| def | find (jbModule, jbType, jbIndex) |
| def | all (jbModule=None, jbType=None) |
| def | hydrate (jbModule=None, jbType=None, ids=[]) |
| Static Public Attributes inherited from JsonBlob.JsonBlob | |
| basepath = os.path.join(AmsEnvironment.FilePath(), 'jsonblob') | |
| indexpath = os.path.join(basepath, 'index.json') | |
| dictionary | constructors = {} |
| bool | indexexists = False |
| bool | indexed = False |
| dictionary | index = {} |
Stepper Motor abstraction.
| def Motors.StepperMotor.__init__ | ( | self, | |
index = None |
|||
| ) |
Initializes the StepperMotor object @param index
| def Motors.StepperMotor.getOutputOrder | ( | self, | |
asList = False |
|||
| ) |
gets the current output order
| def Motors.StepperMotor.joystickCallback | ( | self, | |
| dev_num, | |||
| signal, | |||
| number, | |||
| name, | |||
| value, | |||
| init | |||
| ) |
move the motor to the specified angle
| def Motors.StepperMotor.keyboardCallback | ( | self, | |
| hex, | |||
| ascii | |||
| ) |
perform keyboard callback
| def Motors.StepperMotor.moveByAngle | ( | self, | |
newAngle = 0 |
|||
| ) |
move the motor by the specified angle
| def Motors.StepperMotor.moveToAngle | ( | self, | |
newAngle = 0 |
|||
| ) |
move the motor to the specified angle
| def Motors.StepperMotor.reload | ( | self | ) |
override - sync object with saved data
| def Motors.StepperMotor.save | ( | self | ) |
override - saves stepper specific attributes
| def Motors.StepperMotor.setZeroAngle | ( | self | ) |
assigns 0 angle to the current motor position
| def Motors.StepperMotor.stop | ( | self | ) |
override - also calls save for the current angle
| def Motors.StepperMotor.updateDriveState | ( | self | ) |
update drive state called from scheduled task (runs on it's own thread) stops stepper motor if no changes have been sent in the last 10 seconds delays steps based on rpm and steps per rev if a target is provided, move toward it otherwise use drive state to determine speed
 1.8.12
1.8.12